La mirada de los dibujantes de EL PAÍS sobre el ‘procés’
Peridis y El Roto han publicado más de 400 viñetas en estos años sobre los efectos del plan independentista en la sociedad catalana


El procés independentista catalán ha dado lugar en esta última década a miles de crónicas periodísticas, fotografías y artículos de opinión. Desde el principio se convirtió también en materia de reflexión para los dibujantes de EL PAÍS, que retrataron en sus viñetas los orígenes y desarrollo del desafío, la evolución de sus principales protagonistas y los efectos en la sociedad. José María Pérez González, Peridis, dibujante del diario desde su fundación hace 46 años, ha publicado más de 300 tiras sobre el procés; Andrés Rábago, El Roto, colaborador del diario ya en los años ochenta e ininterrumpidamente desde 1996, ha abordado la cuestión soberanista en un centenar de dibujos. Aquí presentamos una pequeña selección.
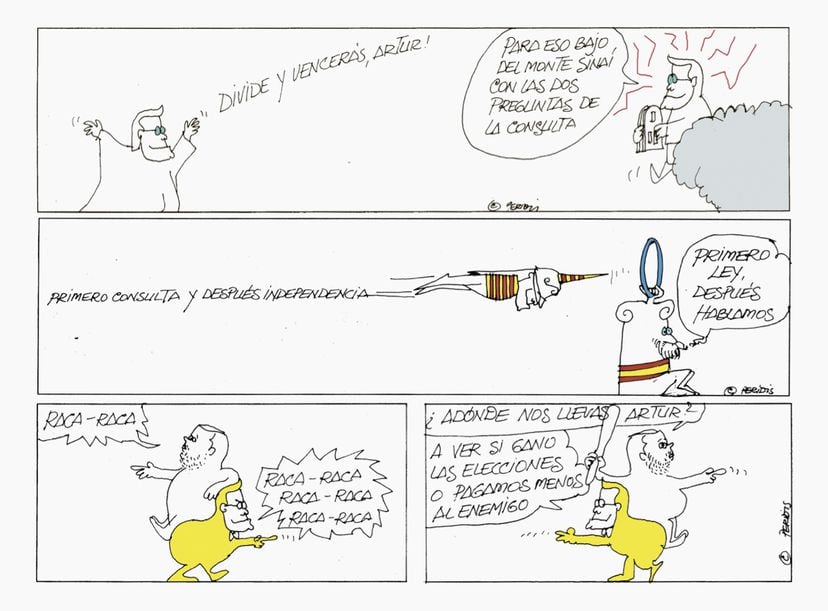
“El procés fue una farsa, que podía terminar en broma o en tragedia. Fue una suerte que no terminara en tragedia”, afirma Peridis desde su mesa de trabajo en Madrid. Él convirtió a Artur Mas en una flecha disparada hacia el referéndum, con la bandera dejando su estela, mostró los esfuerzos de Mariano Rajoy para apagar el incendio “desde lejos”, disfrazó a Carles Puigdemont de Napoleón fugado en Waterloo y mostró la transformación de la estelada en llamarada durante los disturbios posteriores a la sentencia del Tribunal Supremo.












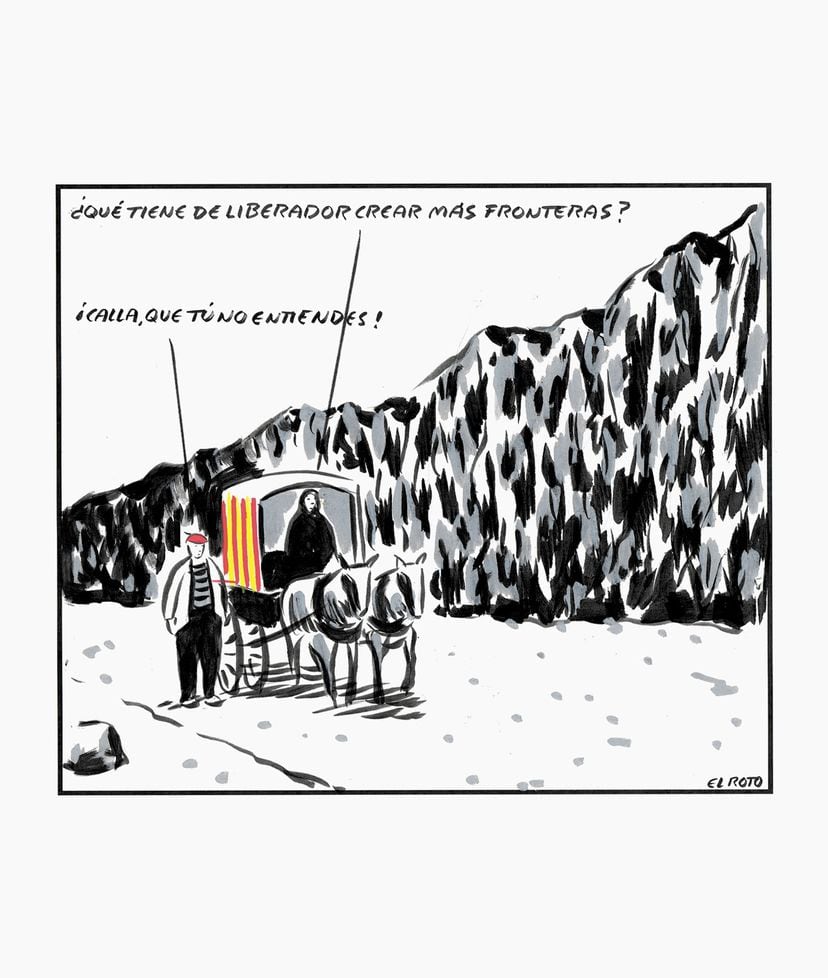
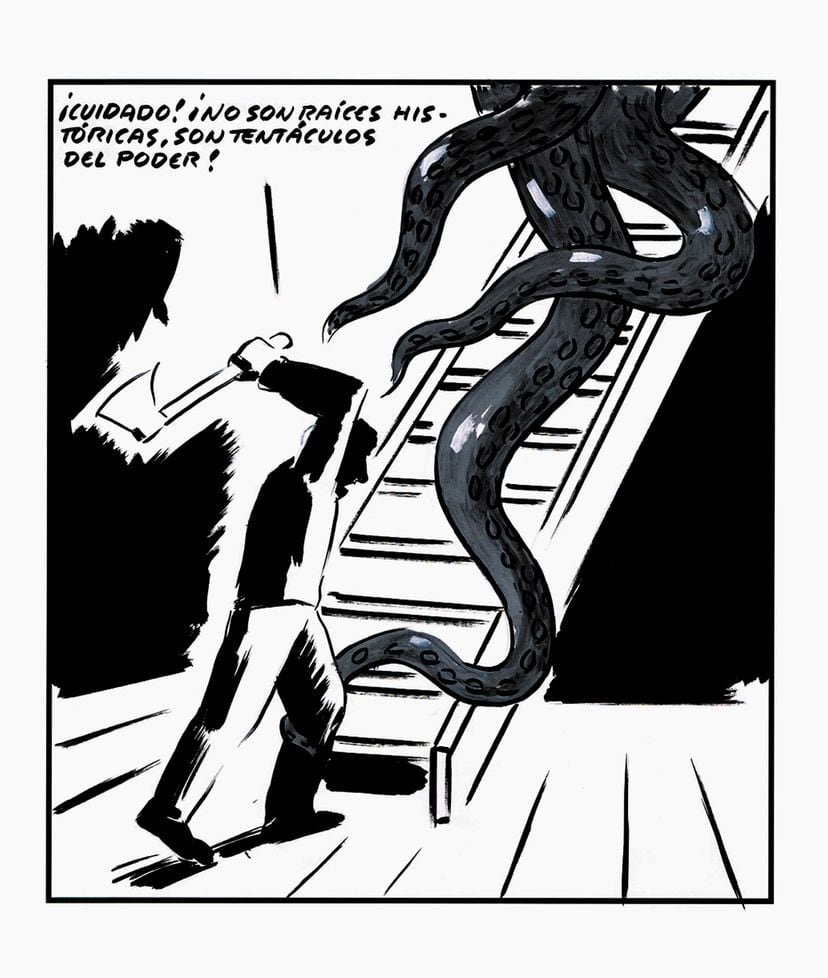
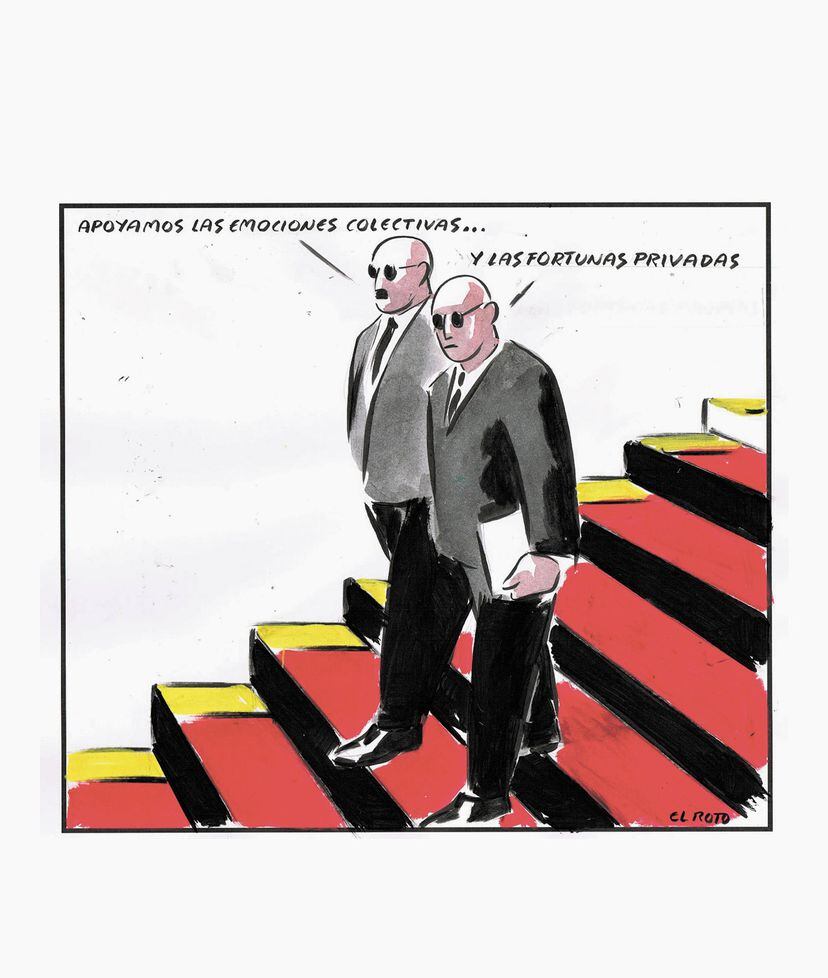
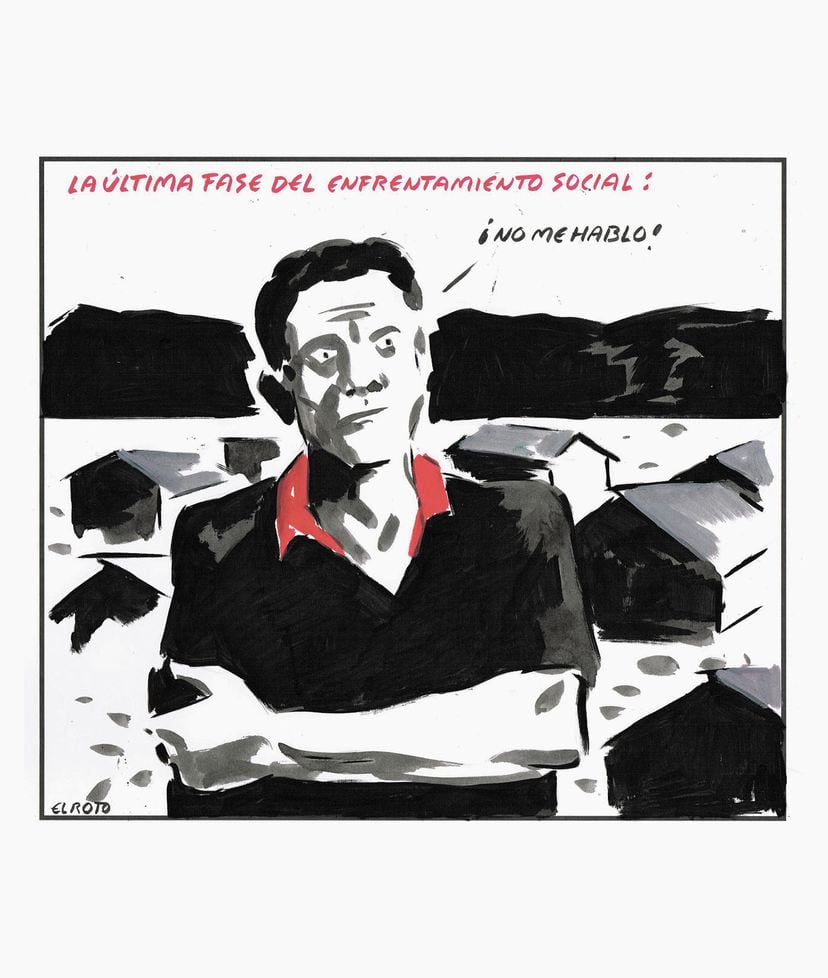
En los dibujos de El Roto, la especificidad del procés catalán se mezcla a menudo con los rasgos comunes que atribuye a todo nacionalismo: el afán por lo pequeño, la frontera, la división, la deriva del supremacismo. La búsqueda de “las raíces” acaba tumbando los troncos de árboles ya frondosos, y se queman constituciones “para iluminar la cueva”. Al final, en el caso catalán, ambas partes contemplan desconcertadas el abismo que han contribuido a cavar.











Tu suscripción se está usando en otro dispositivo
¿Quieres añadir otro usuario a tu suscripción?
Si continúas leyendo en este dispositivo, no se podrá leer en el otro.
FlechaTu suscripción se está usando en otro dispositivo y solo puedes acceder a EL PAÍS desde un dispositivo a la vez.
Si quieres compartir tu cuenta, cambia tu suscripción a la modalidad Premium, así podrás añadir otro usuario. Cada uno accederá con su propia cuenta de email, lo que os permitirá personalizar vuestra experiencia en EL PAÍS.
¿Tienes una suscripción de empresa? Accede aquí para contratar más cuentas.
En el caso de no saber quién está usando tu cuenta, te recomendamos cambiar tu contraseña aquí.
Si decides continuar compartiendo tu cuenta, este mensaje se mostrará en tu dispositivo y en el de la otra persona que está usando tu cuenta de forma indefinida, afectando a tu experiencia de lectura. Puedes consultar aquí los términos y condiciones de la suscripción digital.





















